Design, Fabrication, and Testing of a Rake for the Beachbot Robot
Disney Research Zurich & ETH Zurich
The Beachbot project was initiated by Disney Research Zurich. Here is a link for more information about the Beachbot. The Beachbot is an autonomous mobile robot that can create large scale sand art with a rake attached at the tail of the robot. The rake system consists of seven movable elements actuated by servo motors. The previous rake design was prone to damage. It was easy to go up when a rake hit an obstacle in the sand. This unexpected motion induces the servomotor to rotate in the opposite direction to which it should go. The rotation in the wrong direction while powered on damages the servomotor.
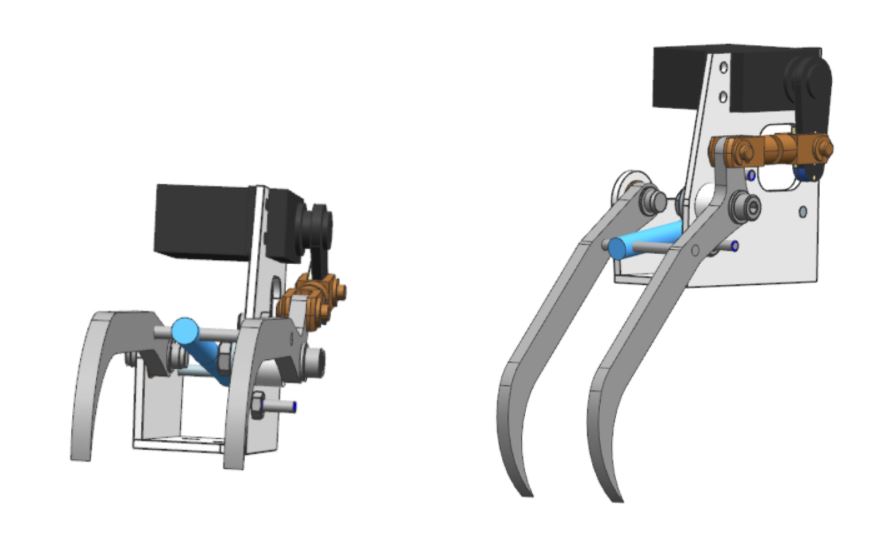
The goal of this project is to identify a more robust design for the rake and then do fabrication, integration with the rake’s control system, and testing. The problem of the previous design can be solved by two different approaches. The first approach is to make a guide structure for moving constraints on the rake. The second approach is to get rid of the linkage between servomotor and rake in order not to exert a force to the servomotor directly. To remove the linkage, we designed hooks attached to the servomotor to transfer the force by pushing the rake.
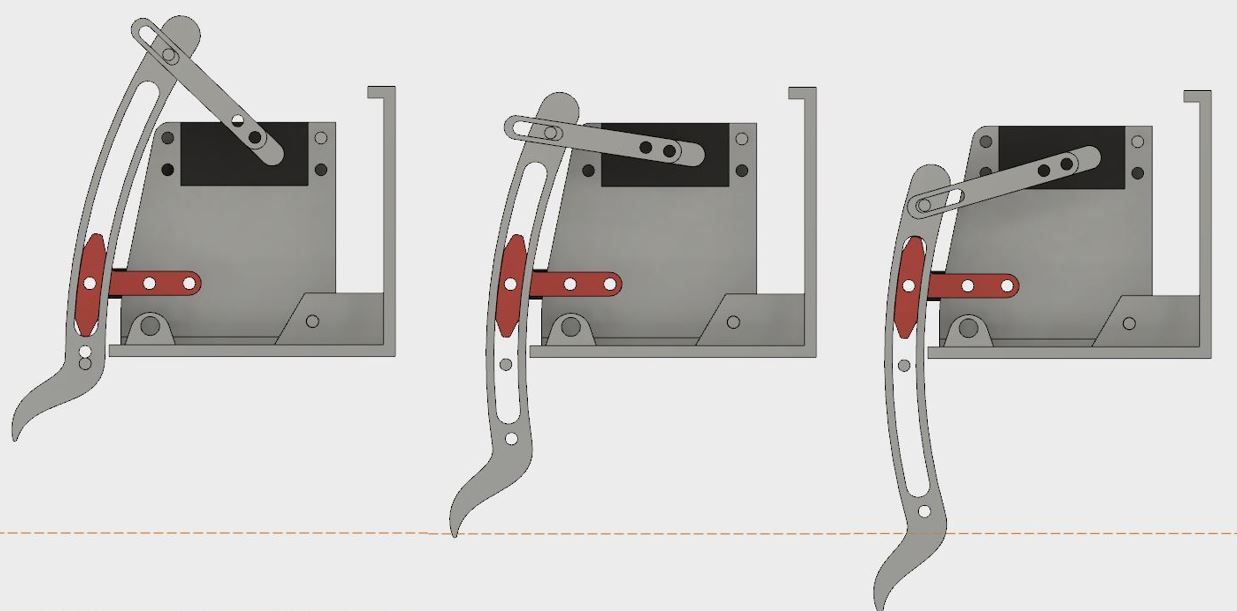
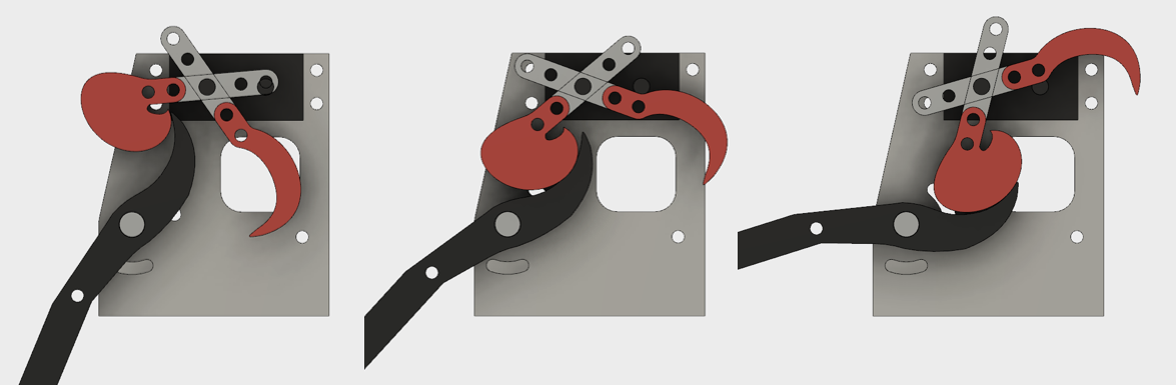
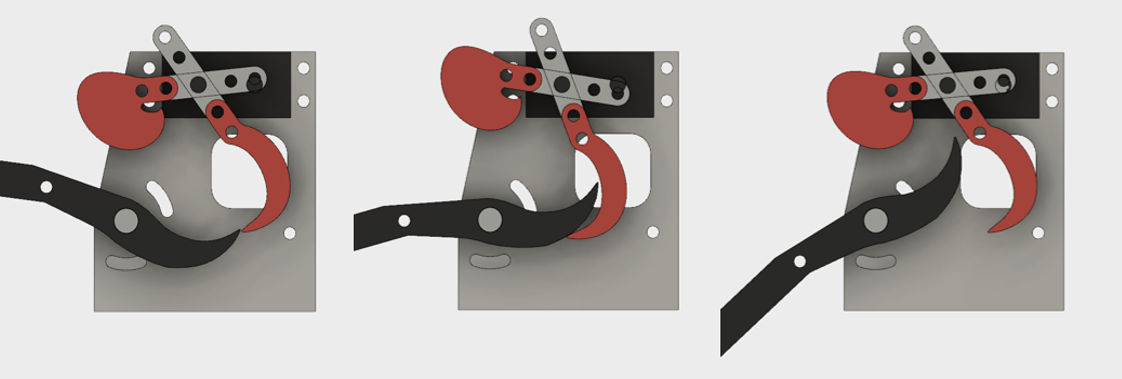
Furthermore, we added a spring which makes rake element return to the lower position for continuing to draw even if the rake goes up due to obstacles.